fast quaternion
...
@author lizhi
♥0 |
Line 67 |
Modified 2015-01-26 14:50:20 |
MIT License
archived:2017-03-20 15:33:26
ActionScript3 source code
/**
* Copyright lizhi ( http://wonderfl.net/user/lizhi )
* MIT License ( http://www.opensource.org/licenses/mit-license.php )
* Downloaded from: http://wonderfl.net/c/uU5l
*/
package
{
import flash.display.Sprite;
import flash.geom.Matrix3D;
import flash.geom.Vector3D;
import com.actionscriptbible.Example
/**
* ...
* @author lizhi
*/
public class TestQuaternion extends Example
{
public function TestQuaternion()
{
var a:Vector3D = new Vector3D(Math.random(), Math.random(), Math.random());
a.normalize();
var matr:Matrix3D = new Matrix3D;
matr.appendRotation(Math.random() * 100, a);
var q:Quaternion = new Quaternion;
q.fromMatrix(matr);
var v1:Vector3D = new Vector3D(Math.random(),Math.random(),Math.random());
var v2:Vector3D = q.rotatePoint(v1);
var v3:Vector3D = q.rotatePoint2(v1);
var v4:Vector3D = matr.transformVector(v1);
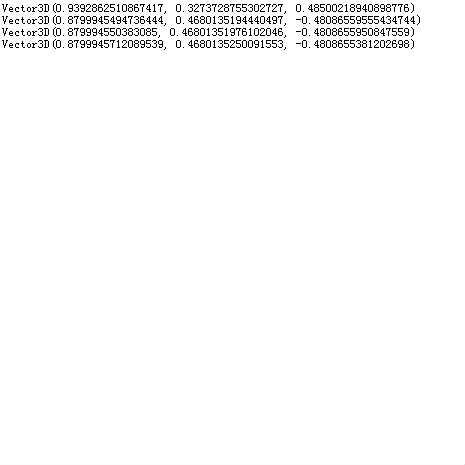
trace(v1);
trace(v2);
trace(v3);
trace(v4);
}
}
}
import flash.geom.*;
class Quaternion extends Vector3D
{
public function rotatePoint(vector:Vector3D, target:Vector3D = null):Vector3D
{
var x1:Number, y1:Number, z1:Number, w1:Number;
var x2:Number = vector.x, y2:Number = vector.y, z2:Number = vector.z;
target ||= new Vector3D();
// p*q'
w1 = -x*x2 - y*y2 - z*z2;
x1 = w*x2 + y*z2 - z*y2;
y1 = w*y2 - x*z2 + z*x2;
z1 = w*z2 + x*y2 - y*x2;
target.x = -w1*x + x1*w - y1*z + z1*y;
target.y = -w1*y + x1*z + y1*w - z1*x;
target.z = -w1*z - x1*y + y1*x + z1*w;
return target;
}
//http://molecularmusings.wordpress.com/2013/05/24/a-faster-quaternion-vector-multiplication/
//t = 2 * cross(q.xyz, v)
//v' = v + q.w * t + cross(q.xyz, t)
public function rotatePoint2(vector:Vector3D):Vector3D {
var t:Vector3D = cross(this, vector);
t.scaleBy(2);
var t2:Vector3D = t.clone();
t2.scaleBy(w);
return vector.add(t2).add(cross(this,t));
}
private function cross(v1:Vector3D, v2:Vector3D):Vector3D {
return new Vector3D(
v1.y * v2.z - v1.z * v2.y,
v1.z * v2.x - v1.x * v2.z,
v1.x * v2.y - v1.y * v2.x
);
}
public function fromMatrix(matrix:Matrix3D):void
{
var v:Vector3D = matrix.decompose(Orientation3D.QUATERNION)[1];
x = v.x;
y = v.y;
z = v.z;
w = v.w;
}
}