WIP testing forked from: Continuous Elastic Collision
forked from Continuous Elastic Collision (diff: 399)
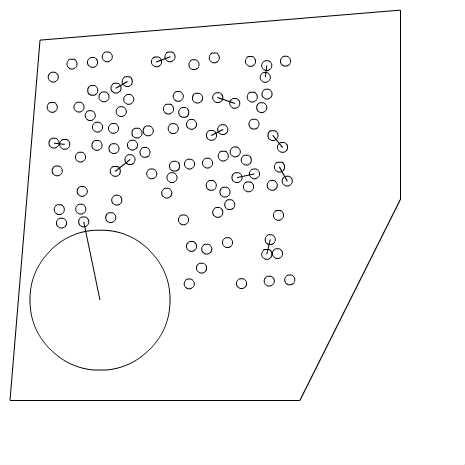
Testing demo of PriorityQueue implementation under CCD in order to exploit temporal coherance between potential collision pairs. This may be better instead of re-testing with entire coarsePhase each time in order to get closest collision pair. Press key to move simulation forward each step. NOTE: code is a mess, just for testing to see if it's possible. Connected lines indicate potential collision pairs in the queue. Navy blue circles indicate the next imminent collision in the queue.Green circles indiciate entities whose collisions were recently resolved in the timeframe. Red circles indicate newly added pairs as a result of collisions that occured midway within the timeframe, whose purple and yellow lines indicate their new velocities.
ActionScript3 source code
/**
* Copyright Glidias ( http://wonderfl.net/user/Glidias )
* MIT License ( http://www.opensource.org/licenses/mit-license.php )
* Downloaded from: http://wonderfl.net/c/lmBt
*/
package
{
import de.polygonal.ds.PriorityQueue;
import flash.display.Sprite;
import flash.display.StageAlign;
import flash.display.StageScaleMode;
import flash.events.Event;
import flash.events.KeyboardEvent;
[SWF(backgroundColor="#DDDDDD", frameRate=60)]
public class ElasticCollisionDemo extends Sprite
{
private var simulator:Simulator;
public function ElasticCollisionDemo()
{
stage.align = StageAlign.TOP_LEFT;
stage.scaleMode = StageScaleMode.NO_SCALE;
initSimulation();
}
private function initSimulation() : void
{
simulator = new Simulator();
stage.addEventListener(KeyboardEvent.KEY_DOWN, simulator.onKeydown);
simulator.addWall( new Wall( 40, 40, 400, 10 ) );
simulator.addWall( new Wall( 400, 10, 400, 200 ) );
simulator.addWall( new Wall( 400, 200, 300, 400 ) );
simulator.addWall( new Wall( 300, 400, 10, 400 ) );
simulator.addWall( new Wall( 10, 400, 40, 40 ) );
// simulator.addParticle( new Particle( 400, 300, 0, 0, 900, 90 ) );
simulator.addParticle( new Particle( 100, 300, 0, 0, 400, 70 ) );
for( var i:int = 0; i < 90; i++ )
{
var canAdd:Boolean = true;
var tx:Number = 50 + Math.random() * 240;
var ty:Number = 50 + Math.random() * 240;
for each( var particle:Particle in simulator.particles )
{
if( Math.abs( particle.x.x - tx ) < particle.r + 5 && Math.abs( particle.x.y - ty ) < particle.r + 5 )
{
canAdd = false;
i--;
break;
}
}
if( canAdd ) simulator.addParticle( new Particle( tx, ty, Math.random() * 900, Math.random() * 900 ) );
}
simulator.addEventListener( Simulator.STEP, onSimulationStep );
simulator.run( this, Event.ENTER_FRAME );
render();
//simulator.run
}
private function onSimulationStep( event:Event ) : void
{
render();
}
public function render() : void
{
graphics.clear();
graphics.lineStyle( 1 );
for each( var wall:Wall in simulator.walls )
{
graphics.moveTo( wall.A.x, wall.A.y );
graphics.lineTo( wall.B.x, wall.B.y );
}
for each( var particle:Particle in simulator.particles )
{
graphics.lineStyle(1, particle.color);
graphics.drawCircle( particle.x.x, particle.x.y, particle.r );
graphics.lineStyle(1, 0);
if (particle.pair && particle.pair.p2) {
graphics.moveTo(particle.pair.p1.x.x, particle.pair.p1.x.y);
graphics.lineTo(particle.pair.p2.x.x, particle.pair.p2.x.y);
}
if (particle.color == 0xFF0000) {
graphics.lineStyle(1, 0xFFFF00);
graphics.moveTo(particle.pair.p1.x.x, particle.pair.p1.x.y);
graphics.lineTo(particle.pair.p1.x.x + particle.pair.p1.v.x, particle.pair.p1.x.y + particle.pair.p1.v.y);
if (particle.pair.p2) {
graphics.lineStyle(1, 0xFF00FF);
graphics.moveTo(particle.pair.p2.x.x, particle.pair.p2.x.y);
graphics.lineTo(particle.pair.p2.x.x + particle.pair.p2.v.x, particle.pair.p2.x.y + particle.pair.p2.v.y);
}
}
}
}
}
}
import __AS3__.vec.Vector;
import de.polygonal.ds.Prioritizable;
import de.polygonal.ds.PriorityQueue;
import flash.events.EventDispatcher;
import flash.events.Event;
import flash.events.KeyboardEvent;
import flash.utils.getTimer;
[Event(name="step", type="Simulator")]
class Simulator extends EventDispatcher
{
public static const STEP:String = "step";
public var particles:Vector.<Particle>;
public var walls:Vector.<Wall>;
//holds all the pairs that passed coarse collision detection
private var coarsePass:Vector.<ICollidablePair>;
private var time:uint;
private var _queue:PriorityQueue = new PriorityQueue(true);
private var _elapsed:Number;
public function Simulator()
{
super();
particles = new Vector.<Particle>();
walls = new Vector.<Wall>();
}
public function onKeydown(e:Event):void
{
var particle:Particle
if (_stepDone) {
newStep();
_stepDone = false;
dispatchEvent( new Event(STEP));
}
else {
//_stepDone = true;
unqueue(); // to resolve closet collision from stepDone
for each( particle in particles )
{
particle.integrateTo(_t);
}
dispatchEvent( new Event(STEP));
}
}
private var _stepDone:Boolean = true;
private var _t:Number= 0;
private function onStepDone(e:Event):void
{
_stepDone = true;
}
public function addParticle( particle:Particle ) : void
{
particles.push( particle );
}
public function addWall( wall:Wall ) : void
{
walls.push( wall );
}
//advances the simulation at each dispatch of the passed event type
public function run( updateDispatcher:EventDispatcher, eventType:String = Event.ENTER_FRAME ) : void
{
// time = getTimer();
//updateDispatcher.addEventListener( eventType, onKeydown, false, 0, true );
}
private var _minT:Number;
private var _minPair:ICollidablePair;
private function unqueue():void {
if (_queue.isEmpty() || _t >= _elapsed ) {
_stepDone = true;
_t = _elapsed;
return;
}
//if (!_queue.contains(_minPair) ) throw new Error("DOn't have!:" );
var pair:ICollidablePair;
var dt:Number;
var t:Number = _t;
var lastPair:ICollidablePair;
pair = _queue.dequeue() as ICollidablePair;
//if (lastPair && lastPair.priority > pair.priority) throw new Error("SHOUDL NOT BE PRIROITY:!" + lastPair.priority + ',' + pair.priority);
if (pair.p2 != null) {
pair.p2.pair = null;
}
pair.p1.pair = null;
pair.p1.color = 0x00FF00;
if (pair.p2) pair.p2.color = 0x00FF00;
dt = pair.t - t;
//if (dt < 0) throw new Error("SHOULD NOT BE!" + pair.t + ", " +t);
t = pair.t;
_t = t;
var rt:Number = _elapsed - t;
if (!_stepDone) {
pair.update(t, rt)
}
else {
/*
for each(var p:Particle in particles) {
p.integrateTo(t);
}
pair.resolve();
*/
pair.update(t, rt)
return;
}
//pair.p1.integrateTo(t);
checkParticleAgainstOthers(pair.p1, t, dt, rt, pair.p2);
if (pair.p2 != null) {
//pair.p2.integrateTo(t);
checkParticleAgainstOthers(pair.p2, t, dt, rt, pair.p1);
}
lastPair = pair;
if (!_queue.isEmpty()) {
pair = _queue.front() as ICollidablePair;
pair.p1.color = 0x3325AA;
if (pair.p2) pair.p2.color = 0x3325AA;
}
}
private function newStep():void {
_queue.clear();
const MAX_ITERATIONS:uint = 100;
//delta time in seconds
var elapsed:Number = 30 / 1000;
_elapsed = elapsed;
//start this step at 0 and advance to elapsed
var t:Number = 0;
_t = 0;
var dt:Number;
var iteration:uint = 0;
// while( t < elapsed && ++iteration <= MAX_ITERATIONS )
// {
//start by trying to step over the entire remainder
dt = elapsed - t;
//neglect pairs whose bounding boxes don't overlap
doCoarsePhase( dt );
//holds the next future collision
// var minPair:ICollidablePair = null;
// var minT:Number = Number.POSITIVE_INFINITY;
_minPair = null;
_minT = Number.POSITIVE_INFINITY;
for each( var pair:ICollidablePair in coarsePass )
{
//if the collision will happen within the current time-step
//compare the time against the current minimum
if ( pair.willCollide( dt ) ) {
// This code sucks need to rethink better the logic!!
var checkTA:Boolean = pair.p1.pair == null;
var checkTB:Boolean = pair.p2 ? pair.p2.pair == null : true;
// need to remove/add to queue as needed if t is found lower
if ( pair.p1.pair != null ) {
if ( pair.t < pair.p1.pair.t ) {
pair.p1.pair.removeFromParent();
checkTA = true;
}
}
if (pair.p2 != null && pair.p2.pair != null ) {
if (pair.t < pair.p2.pair.t) {
pair.p2.pair.removeFromParent();
checkTB = true;
}
}
if (checkTA && checkTB) {
pair.commit();
}
// For debugging purposes only (to check!)
if (pair.t < _minT) {
_minT = pair.t;
_minPair = pair;
}
}
}
}
// TODO: this is buggy
// particle velocitiy has changed due to collision in timeframe, need to recheck against other moving particles and environment
public function checkParticleAgainstOthers(p:Particle, t:Number, dt:Number, rt:Number, exclude:Particle):void {
var aabb:AABB = p.aabb;
//var testPP:ParticleParticlePair = new ParticleParticlePair(null, null);
//var testPW:ParticleWallPair = new ParticleWallPair(null, null);
var minPair:ICollidablePair;
var minT:Number = Number.MAX_VALUE;
var testPair:ICollidablePair;
for each( var w:Wall in walls )
{
if (aabb.isOverlapping(w.aabb)) {
testPair = new ParticleWallPair(_queue, p, w);
if (testPair.willCollide(rt)) {
testPair.t += t;
if (testPair.t < minT) {
minPair = testPair;
minT = testPair.t;
}
}
}
}
for each( var particle:Particle in particles )
{
if (particle === exclude) continue;
if (particle!= p) {
particle.integrateTo(t);
//particle.update(dt);
if (aabb.isOverlapping(particle.aabb)) {
testPair = new ParticleParticlePair(_queue, p, particle);
if (testPair.willCollide(rt)) {
testPair.t += t;
if (testPair.t < minT) {
if (particle.pair != null && particle.pair.t <= testPair.t) {
continue;
}
minPair = testPair;
minT = testPair.t;
}
}
}
}
}
//return;
if (minPair != null) {
//if (minPair.p2 != null && exclude != null && exclude === minPair.p2) return;
//minPair.updatePriority();
if (minPair.p2 != null && minPair.p2.pair !=null) {
// if (minPair.p2.pair.t <= minPair.t ) {
//throw new Error("Exit still got earlier pair!");
// return;
// }
minPair.p2.pair.removeFromParent();
}
minPair.p1.color = 0xFF0000;
if (minPair.p2) minPair.p2.color = 0xFF0000;
minPair.commit();
}
}
//rules out some unnecessary collision checks
public function doCoarsePhase( dt:Number ) : void
{
coarsePass = new Vector.<ICollidablePair>();
var aabb:AABB;
for each( var particle:Particle in particles )
{
//update the particle's bounding box to account for its velocity
particle.t = 0;
particle.color = 0;
particle.pair = null;
particle.update( dt );
aabb = particle.aabb;
//check each particle against each wall
for each( var wall:Wall in walls )
{
if( aabb.isOverlapping( wall.aabb ) )
{
coarsePass.push( new ParticleWallPair(_queue, particle, wall ) );
}
}
}
var n:int = particles.length;
//check each particle against each other
for( var i:int = 0; i < n - 1; i++ )
{
var p1:Particle = particles[ i ];
aabb = p1.aabb;
for( var j:int = i + 1; j < n; j++ )
{
var p2:Particle = particles[ j ];
if( aabb.isOverlapping( p2.aabb ) )
{
coarsePass.push( new ParticleParticlePair( _queue, p1, p2 ) );
}
}
}
}
}
//describes a common interface for collision pairs
class ICollidablePair implements Prioritizable
{
public function ICollidablePair(queue:PriorityQueue) {
parentQueue = queue;
}
public var priority:int;
public var position:int;
public var t:Number;
public function willCollide( dt:Number ) : Boolean {return false }
public function resolve() : void { }
public function update(t:Number, rt:Number):void { }
public var p1:Particle;
public var p2:Particle;
public function commit():void {
//if (p2!=null && p2.pair!=null) p2.pair.removeFromParent();
if (p1.pair != null || (p2 && p2.pair != null) ) throw new Error("SHOuld not commit until removal!");
updatePriority();
parentQueue.enqueue(this);
p1.pair = this;
if (p2 != null) p2.pair = this;
}
public var parentQueue:PriorityQueue;
public function removeFromParent():void {
parentQueue.remove(this);
p1.pair = null;
p1.color = 0;
if (p2 != null) {
p2.pair = null;
p2.color = 0;
}
}
public function updatePriority():void {
priority = t * (int.MAX_VALUE/30);
//t = priority * 0.0000000001;
}
}
class ParticleParticlePair extends ICollidablePair
{
public function ParticleParticlePair(queue:PriorityQueue, p1:Particle, p2:Particle )
{
super(queue);
this.p1 = p1;
this.p2 = p2;
}
override public function willCollide( dt:Number ) : Boolean
{
const EPSILON:Number = 1e-2;
//points from 1 -> 2
var dx:Vec2D = p2.x.minus( p1.x );
//if the circle's are already overlapped, return true (this brings the sim to a halt)
var c:Number = dx.dot( dx ) - ( p1.r + p2.r ) * ( p1.r + p2.r );
if( c < 0 )
{
t = EPSILON;
return true;
}
//relative velocity
var dv:Vec2D = p2.v.minus( p1.v );
var a:Number = dv.dot( dv );
if( a < EPSILON ) return false; //not moving enough toward each other to warrant a response
var b:Number = dv.dot( dx );
if( b >= 0 ) return false; //moving apart
var d:Number = b * b - a * c;
if( d < 0 ) return false; //no intersection
t = ( -b - Math.sqrt( d ) ) / a;
//priority = t * 100000;
//t = priority * 0.00001;
//circle's collide if the time of collision is within the current time-step
return t <= dt;
}
//simulation has been updated so that the particles are just colliding
override public function resolve() : void
{
//points from 1 -> 2
var cn:Vec2D = p2.x.minus( p1.x );
cn.normalize();
//relative velocity
var dv:Vec2D = p2.v.minus( p1.v );
//perfectly elastic impulse
var impulse:Number = cn.dot( dv.times( -2 ) ) / cn.dot( cn.times( 1 / p1.mass + 1 / p2.mass ) );
//scale normal by the impulse
p1.v.plusEquals( cn.times( -impulse / p1.mass ) );
p2.v.plusEquals( cn.times( impulse / p2.mass ) );
//p1.v.x = 0; p1.v.y = 0;
//p2.v.x = 0; p2.v.y = 0;
}
override public function update(t:Number, rt:Number):void {
p1.integrateTo(t);
p2.integrateTo(t);
resolve();
p1.update(rt);
p2.update(rt);
}
}
class ParticleWallPair extends ICollidablePair
{
public var w:Wall;
public function ParticleWallPair( queue:PriorityQueue, p:Particle, w:Wall )
{
super(queue);
this.p1 = p;
this.w = w;
}
override public function willCollide( dt:Number ) : Boolean
{
//this is line/line intersection
//A is the position of the particle
//B is the position + velocity
//together they make the segment AB
//CD is the line segment made up of the wall's end points
var A:Vec2D = p1.x;
var B:Vec2D = p1.x.plus( p1.v );
var AB:Vec2D = B.minus( A );
//inflate the normal by the particle's radius
var normScaledRadius:Vec2D = w.normal.times( -p1.r );
//push the wall segment in by this amount
var C:Vec2D = w.A.plus( normScaledRadius );
var D:Vec2D = w.B.plus( normScaledRadius );
var CD:Vec2D = D.minus( C )
var AC:Vec2D = C.minus( A );
t = w.normal.dot( AC ) / w.normal.dot( AB );
if( isNaN( t ) ) t = 0;
//priority = t * 100000;
//t = priority * 0.00001;
return t <= dt && t >= 0;
}
override public function update(t:Number, rt:Number):void {
p1.integrateTo(t);
resolve();
p1.update(rt);
}
//simulation has been updated so that the particles are coincident
override public function resolve() : void
{
var cn:Vec2D = w.normal;
//relative velocity
var dv:Vec2D = p1.v;
//perfectly elastic
var impulse:Number = cn.dot( dv.times( -2 ) ) / ( 1 / p1.mass );
p1.v.plusEquals( cn.times( impulse / p1.mass ) );
//p1.v.x = -cn.x*6;
//p1.v.y = -cn.y*6;
//
}
}
class Wall
{
public var A:Vec2D;
public var B:Vec2D;
public var aabb:AABB;
public var normal:Vec2D;
public function Wall( ax:Number, ay:Number, bx:Number, by:Number )
{
A = new Vec2D( ax, ay );
B = new Vec2D( bx, by );
normal = new Vec2D( B.y - A.y, -( B.x - A.x ) );
normal.normalize();
aabb = new AABB();
aabb.minx = Math.min( ax, bx );
aabb.maxx = Math.max( ax, bx );
aabb.miny = Math.min( ay, by );
aabb.maxy = Math.max( ay, by );
}
}
class Particle
{
//position
public var x:Vec2D;
//velocity
public var v:Vec2D;
public var mass:Number;
//radius
public var r:Number;
//bounding box
public var aabb:AABB;
public var t:Number;
public var pair:ICollidablePair;
public var color:uint = 0;
public function Particle( xx:Number, xy:Number, vx:Number, vy:Number, mass:Number = 1.0, radius:Number = 5 )
{
x = new Vec2D( xx, xy );
v = new Vec2D( vx, vy );
this.mass = mass;
this.r = radius;
aabb = new AABB();
}
public function update( t:Number ) : void
{
var xt:Number = x.x + v.x * t;
var yt:Number = x.y + v.y * t;
var minx:Number = Math.min( x.x, xt );
var maxx:Number = Math.max( x.x, xt );
var miny:Number = Math.min( x.y, yt );
var maxy:Number = Math.max( x.y, yt );
aabb.minx = minx - r;
aabb.maxx = maxx + r;
aabb.miny = miny - r;
aabb.maxy = maxy + r;
}
public function integrate( dt:Number ) : void
{
x.x += v.x * dt;
x.y += v.y * dt;
//if (pair) pair.t -= dt;
}
public function integrateTo(globalT:Number):void {
if (globalT == t) return;
var dt:Number = globalT - t - 1e-4;
x.x += v.x * dt;
x.y += v.y * dt;
t = globalT;
//if (pair) pair.t -= dt;
}
}
class AABB
{
public var minx:Number = 0;
public var maxx:Number = 0;
public var miny:Number = 0;
public var maxy:Number = 0;
public function isOverlapping( aabb:AABB ) : Boolean
{
if( minx > aabb.maxx ) return false;
if( miny > aabb.maxy ) return false;
if( maxx < aabb.minx ) return false;
if( maxy < aabb.miny ) return false;
return true;
}
}
class Vec2D
{
public var x:Number;
public var y:Number;
public function Vec2D( x:Number = 0.0, y:Number = 0.0 )
{
this.x = x;
this.y = y;
}
public function plusEquals( vec2D:Vec2D ) : void
{
x += vec2D.x;
y += vec2D.y;
}
public function plus( vec2D:Vec2D ) : Vec2D
{
return new Vec2D( x + vec2D.x, y + vec2D.y );
}
public function minus( vec2D:Vec2D ) : Vec2D
{
return new Vec2D( x - vec2D.x, y - vec2D.y );
}
public function times( s:Number ) : Vec2D
{
return new Vec2D( x * s, y * s );
}
public function dot( vec2D:Vec2D ) : Number
{
return x * vec2D.x + y * vec2D.y;
}
public function get magnitude() : Number
{
return Math.sqrt( x * x + y * y );
}
public function normalize() : void
{
var length:Number = magnitude;
if( length == 0 ) return;
x /= length;
y /= length;
}
}